本文以三菱PLC控制伺服马达为例,具体分享一下伺服马达控制步骤。


三菱伺服马达
1.设置定位模块基本参数
在智能功能模块中(QD77MS系列)根据机械配置不同设置好相应的参数
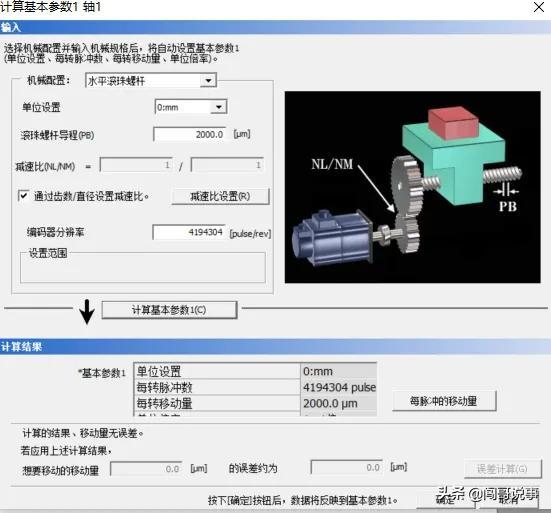
基本参数设置
2.设置原点回归基本参数
根据实际情况选择:近点DOG型、数据设定型、计数型等原点回归方式。

原点回归方式
3.设置伺服放大器参数
设置绝对位置系统、相对位置系统、自动调谐相应等参数,也可以选择“一键式调整”进行相关的参数设置。
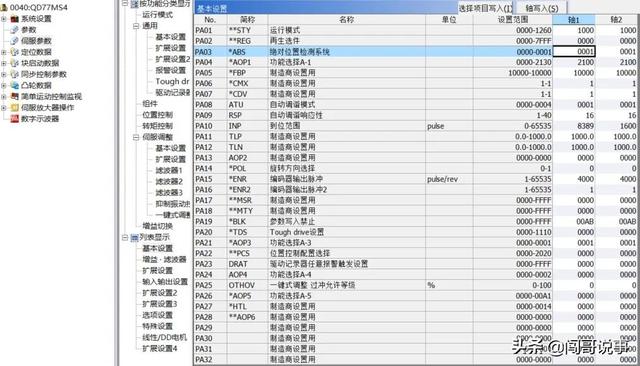
伺服放大器参数设置
4.伺服外部信号程序
包含伺服马达电源信号、伺服马达刹车信号等外围接入信号。
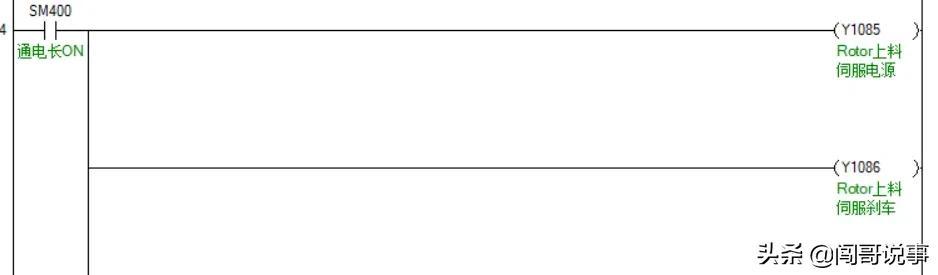
外部信号程序
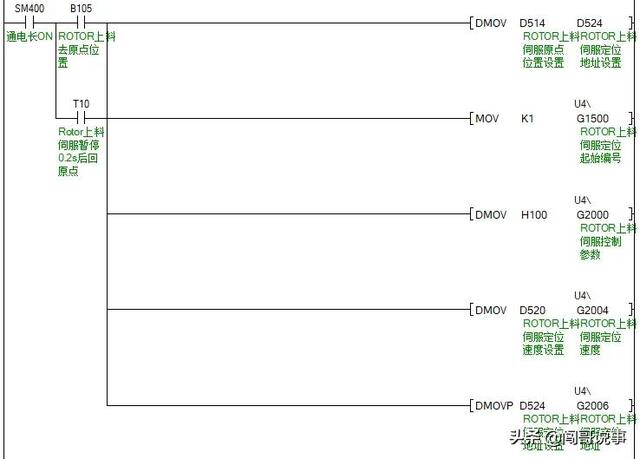
5.原点回归程序
根据不同的原点回归方式,进行原点回归。
原点回归程序
6.手动程序
JOG+、JOG-、伺服停止、伺服报警复位等与PLC CPU 输入/输出信号。
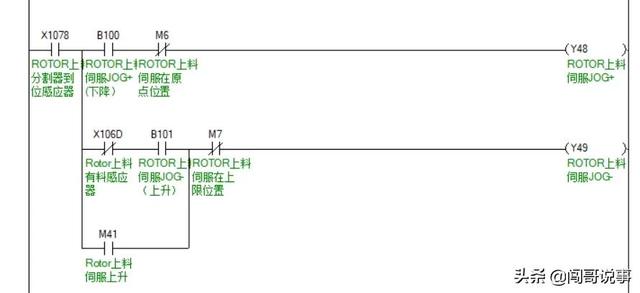
手动程序
7.当前参数反馈&控制参数写入程序
①.反馈参数:
伺服马达的当前位置、报警代码、当前速度等。
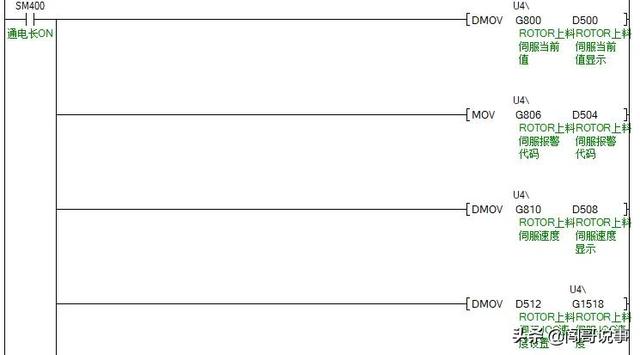
当前状态反馈
②.控制参数:
写入JOG速度、伺服定位速度等相关的控制参数。
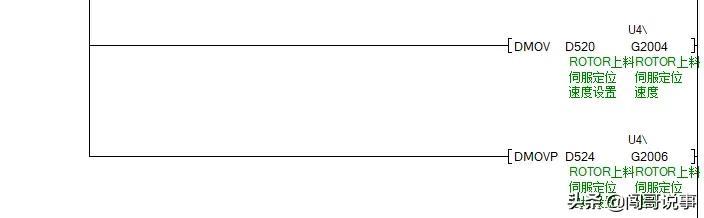
控制参数
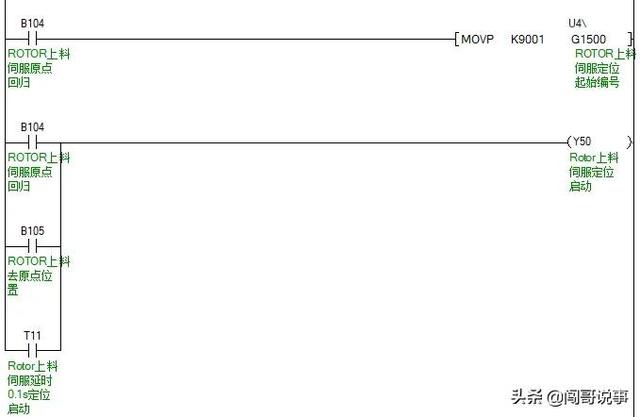
8.伺服定位启动程序
包含伺服定位起始编号、定位地址、定位启动信号。
定位启动参数写入
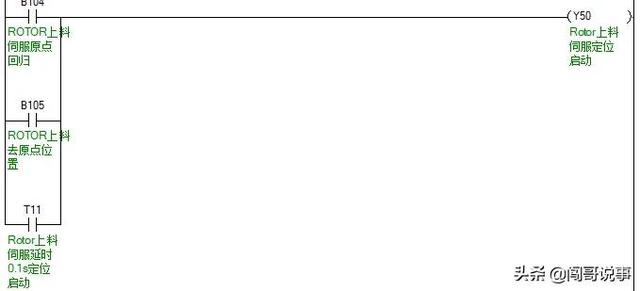
定位启动
9.试运行
按照以上的步骤,就可以试运行伺服马达了。
关注我,学习更多电气知识!
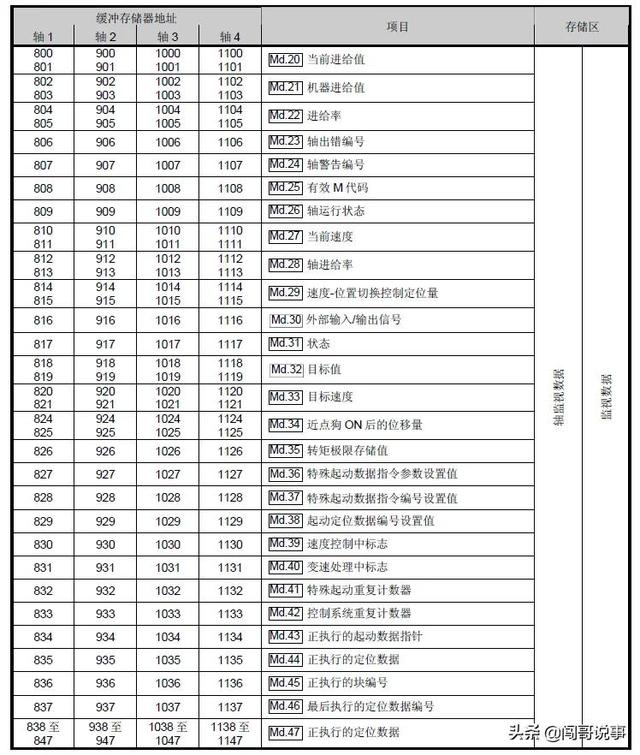
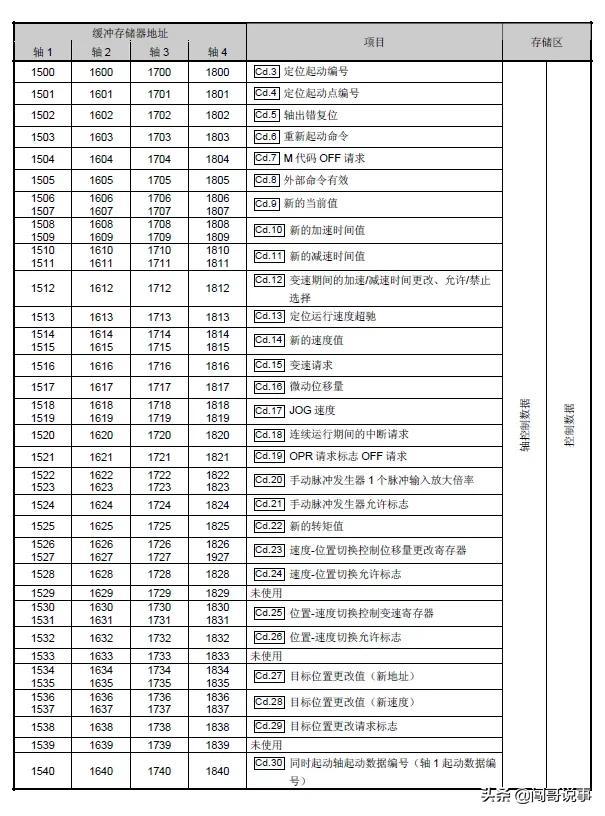
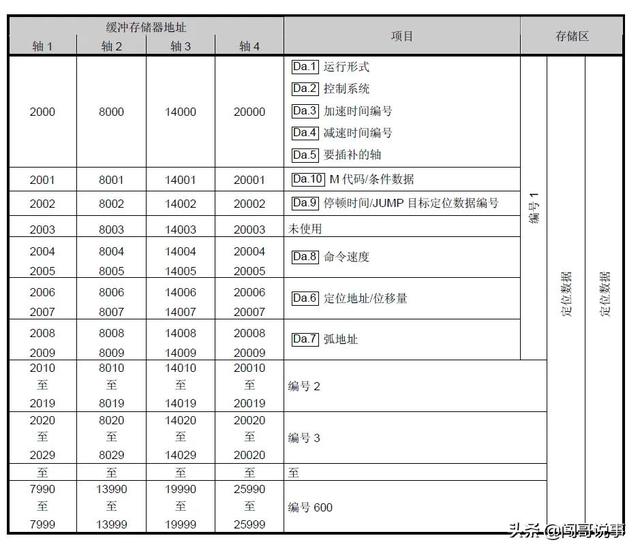
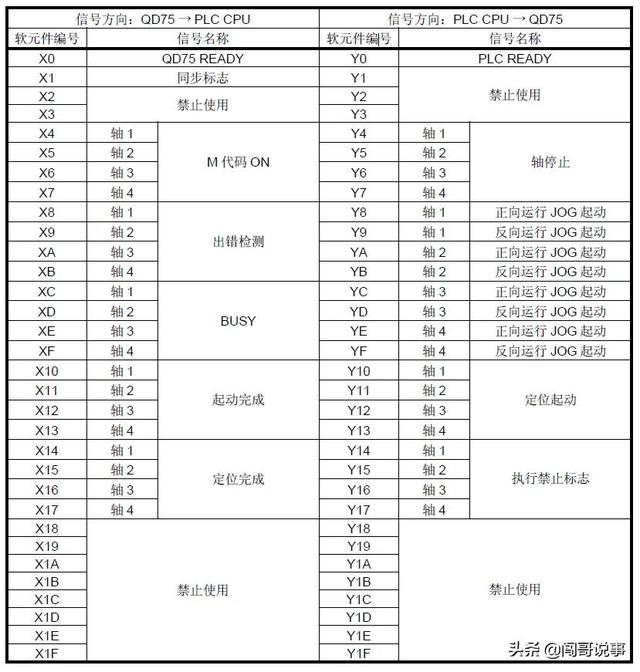
附:缓冲存储器地址分配表
如若转载,请注明出处:https://www.vsaren.com/135473.html
相关推荐
-
赚钱最快的小游戏没广告,可以赚钱的小游戏不用看广告的赚钱赚的特别多?
?据博主“毕导THU ”估算,按一局使用3个道具估算,玩家玩50局游戏大概要看75分钟的广告、100局为150分钟,看广告的时间已经可以看场电影了,而当玩家玩到1000局时,看广告…
-
微信陌生人可以看十条朋友圈怎么算_搜索好友能看到吗,微信陌生人可以看十条朋友圈怎么算陌生人
微信大大方便我们的生活,平时我们在跟朋友聊天,发信息,或者是出门买东西的时候都可以用到它。但是大家有没有发现,经常会有一些陌生的人添加我们好友。其实是这两个小框框,我们没有关闭掉,…
-
上海创业优惠政策,上海创业优惠政策 2021?
“我是吴泾本地人,最初选择回到小镇创业,是因为这里有着两所双一流大学(上海交大、华师大)。”近日,在闵行区吴泾镇2022年招商推介大会上,本地创业者蒋渊讲述的“我与吴泾的故事”让人…
-
朋友圈文案怎么才能更吸引人,吸引人的朋友圈营销文案怎么写?
随着微信快速普及,越来越多人正在使用微信,而朋友圈也慢慢成为社交平台的新战场。朋友圈在社交中占有非常重要的位置,无论日产生活的分享,还是微商或者企业的营销都可以在朋友圈中展示,因为…
-
微信小程序平台客服(微信小程序微信客服)
现在微信公众号是十分重要的宣传自己产品、实现营销的渠道。很多自媒体人和企业都拥有自己的微信公众号,发布内容来吸引一大批粉丝。所以企业需要一个桥梁,来搭建客户和企业之间的沟通。那在线…
-
女人有自己的房子感受,女生买房子是何种感想?
蚊帐刚洗好就可以挂了,有洗衣机就是好,有脱水功能就是快, 一天洗多少都没问题,只要在自己家,自己有地方晒就好。不像以前在外面打工,一个宿舍住十个人,夏天热还好,春天下雨就没地方晒,…
-
拓客新方法,小区拓客新方法?
拓客新方法,小区拓客新方法? 现代营销中的拉新获客环节非常重要,它涉及到吸引新用户,增加产品曝光度以及提高销量等关键指标。以下是10种策略,可以帮助快速引流,吸引精准客户: 自媒体…
-
副业项目介绍,介绍副业的文案
在现代社会,越来越多的人开始关注副业项目。生活成本不断上涨,单靠一份固定工作往往无法满足个人或家庭的经济需求。与此副业的多样性和灵活性为人们提供了更多的选择。不论是上班族、学生,还…
-
iptv直播源m3u8下载2020(iptv节目源m3u)
高中的时候我特别喜欢捣鼓手机,然后我一个哥们儿在我的强烈推荐下买了个 HTC Dream(G1) 手机。 G1 作为谷歌的第一个亲儿子,它出厂搭载的是 Android 1.5 系统…
-
社群拓客软件,社群拓客软件有哪些?
社群拓客软件,社群拓客软件有哪些? 对于众创指购的合伙人而言,建立客户联系和开拓新客户渠道是业务成功的关键因素。而众创指购众信群聊正是一个专为市场推广和客户管理而设计的社交应用,它…